近幾年,人形機器人賽道迅速升溫,越來越多的科技巨頭與創業公司紛紛涌入,試圖在這場技術競逐中搶占先機。
但在繁榮的表象之下,行業也開始涌現出另一種聲音。金沙江創投管理合伙人朱嘯虎近期便提出了不同的看法:商業化落地困難、技術成本居高不下、具體應用場景尚不明朗等諸多因素,讓他們決定暫時擱置在這一領域的投資布局。
人形機器人究竟是“真風口”還是“行業泡沫”?就在市場對這一領域前景仍存疑慮時,一個意外的認可引起了業內的注意:全球頂級人形機器人公司Figure的CEO親自點贊了一家來自中國的黑馬企業——上海開普勒機器人。
這家初創公司旗下的K2“大黃蜂”機器人不僅在商業化道路上布局清晰明確,更令人關注的是,其商業模式與特斯拉Optimus高度相似。
從切入市場的方式看,開普勒人形機器人瞄準了工業領域這一明確的應用場景,并同時采用了“技術驅動+需求導向”的雙輪戰略。這一務實而前瞻的布局,或許正是讓開普勒在全球人形機器人賽道中脫穎而出的關鍵所在。
真正能在工廠里干活的機器人啥樣?
有研究預計,到2026年,中國人形機器人市場規模可達到104.71億元,到2035年更有望突破3000億元,其中工業場景應用占比可能超過60%。
但在實際工業環境中,并不是說機器人只要夠靈活、夠智能,就能在工廠里順利 “搬磚”。在真實的工廠環境里,人形機器人要想成為合格的 “打工人”,得具備一些特定的能力。
在工廠上班,效率是重中之重。一個合格的工人得能長時間連續干活,工廠可不會要那種干 2 小時就歇 2 小時的人。而且工廠的工作環境比較封閉,對工人的要求就是高效、熟練。另外,工人得服從企業管理,工作流程能高效響應,碰到特殊情況也知道按規范流程處理,這對安全生產特別重要。
這些要求和那些只會跳舞、翻跟頭的人形機器人發展方向完全不一樣。甚至有些用世界模型訓練的機器人,做個簡單小任務,成功率才 60%,根本沒法在工廠里好好干活。
那開普勒人形機器人憑啥就能在工業場景里落地,當好一個藍領工人呢?

連續工作的有效保障 ——“充電 1 小時,連干 8 小時”
在工廠,一個班次一般是8小時。通常得安排 2 個班組的工人輪流上班,要是產量任務重,還得加人,搞3個班組 24 小時不間斷三班倒。這樣一來,企業得儲備更多人力,管理起來也更麻煩,頻繁交接班還容易出生產事故。
開普勒人形機器人就特別厲害,它充電 1 小時,就能連續工作 8 小時。現在市面上,除了開普勒和特斯拉架構的機器人,其他機器人標稱續航大多在 2 - 4 小時,真到了實際搬運 5kg 以上的東西,或者做復雜動作的時候,能用的時間也就 1 - 2 小時。
就算安排人專門給機器人換電池,也不現實啊。要是工廠有 10 臺機器人,起碼得配 10 個人專門伺候它們換電池、維護,這哪是機器人給人打工,簡直是人在伺候機器人。開普勒人形機器人續航能達到 8 小時,可比其他機器人強太多了,能讓生產線一直穩定運行,生產效率大大提高,還不用專門安排人定時去維護。

開普勒人形機器人續航這么長,主要是因為它獨特的低能耗設計。它用的小導程方案,能讓機器人在運動的時候也節省能耗。機器人關節靜止或者承受反驅負載的時候,就算不供電,關節也能牢牢鎖住,不會變形移位。這種 “省電模式”,目前也就特斯拉和開普勒做得比較好。其他結構的人形機器人,要是電機不一直供電,關節根本固定不住,連站都站不穩,想維持個靜態姿勢都得一直耗電,續航短也是必然的。
而且,開普勒還有自己獨家的控制算法。這個算法能實時監測關節的狀態和受到的外力,機器人自己就能判斷什么時候可以 “無電自鎖” 休息會兒,什么時候得趕緊啟動執行器,防止位置偏移。這樣既能節能,反應又快,能量分配肯定是最合理的。
穩定工作的強壯身體 ——“超強負載能力,雙臂負載達 30 公斤”
現在市面上大家常見的人形機器人,好多都擅長跳舞、后空翻這些靈活的動作。但為啥很少看到它們在工廠里搬運重物、長時間干活呢?這是由它們的結構決定的。這些靈巧型的人形機器人大多是獨立電機驅動的鏈式串聯結構,這種結構自由度高、活動范圍大,確實很靈活,可剛性不足,不耐用,根本不適合在工廠干重體力活,干一會兒可能就壞了。工廠里常見的大型機械臂,大多是并聯結構,抗干擾能力強,可自由度低,活動范圍也受限。
開普勒和特斯拉的人形機器人采用了 “串并聯結構”,這個結構既能提高機器人的負載能力,又能讓它更靈活,就是研發起來難度很大。
目前,串聯結構機器人一般最大負載能力在 5kg 左右,在實際工業環境里根本不夠用。很多國家都有規定,單個搬運工人能抬舉的重量是有限的。比如英國規定,單個搬運工人不能抬超過 30 公斤的物品;美國職業安全與健康管理局一般建議不超過 50 磅(差不多 22.7 公斤)。這就意味著,如果人形機器人的負載能力達不到 25 - 30 公斤,碰到重體力搬運任務,人和普通機器人都干不了。
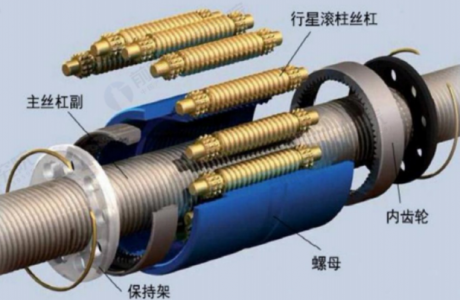
開普勒人形機器人就不一樣了,它通過串并聯結構里的自研行星滾柱絲杠執行器提供強大動力,雙臂負載能達到 30 公斤,完全滿足 “搬磚人” 對力量的需求。它的直線執行器推力峰值能達到 8200N,是普通電機的 3 - 5 倍,再搭配自研旋轉執行器,定位精度能達到 0.01 度,可以做毫米級的精細操作,動作又穩又可靠。在開普勒官方發布的實測視頻里,單個自研行星滾柱絲杠執行器甚至能拉起 200kg 的摩托車。

更有全球領先的 ROI 方案 ——“3 萬美元的平替特斯拉”
開普勒人形機器人續航8小時,能輕松替代 2 班工人連續工作,企業在產量需求大的時候,都不用額外儲備人力了。按照不同工位機器人替代工人的綜合效率 0.6 - 1 來算,一臺開普勒人形機器人差不多能替代 1.2 - 2 個人力。開普勒對外發布,第一批量采標準版機器人最低售價能降到約 3 萬美金 / 臺。
平均算下來,一臺能替代 1.5 個人力。企業要是購買了開普勒量采標準版機器人,就算把后續的軟件費用和延保費用都算上,平攤下來替代一個人類工人的總費用也就 14.3 萬。就拿中國長三角地區來說,企業雇傭一個普通工人,加上工資、社保、福利這些,一年的綜合成本大概在 8 - 10 萬元。14.3 萬的一次性投入,企業 1.5 - 1.8 年就能回本,能給企業節省不少后續人力成本。
開普勒人形機器人量采標準版能賣 3 萬美元左右,是因為他們改進了工藝,成功降低了核心零部件的成本。開普勒說,他們把每個螺母的磨削時間從 20 小時縮短到了 2 小時。原來 28 個關節模組需要 14 個規格,經過優化組合,最后只需要 4 個旋轉規格和 4 個直線規格,這樣就能通過批量生產降低成本。算下來,整個機器人的關節模組成本預計能降低 50%。
國外的人形機器人價格動不動就上百萬美元的售價,在國內,和開普勒能力差不多的人形機器人,目前定價大概在 50 - 70 萬人民幣左右。開普勒賣 3 萬美元,明顯就是想成為 “特斯拉 Optimus 平替款”,滿足工業客戶對性價比的高要求,從經濟賬上看,真的很劃算。
在裝配線柔性化方面,開普勒人形機器人也很有優勢。在汽車制造過程中,傳統的機械臂得在固定的工位上編程才能工作,開普勒人形機器人就不一樣了,它能適應那些沒有固定結構的環境,像沖壓收料、零部件裝配這些工作都能做。它還有自研的力觸覺靈巧手,可以通過多模態靈巧操作完成很精細的任務。
傳統的自動導引車(AGV)進工廠的話,需要鋪設磁軌,或者改造工廠環境,這就得花不少額外的錢。開普勒人形機器人就方便多了,它不用改造環境,靠著視覺 SLAM 和紅外雙目 3D 攝像頭就能實現自主導航,在復雜的操作環境里,也能安全又穩定地搬運 30kg 的料箱或者托盤。比如說,K2 型號已經在實際的倉庫環境中測試搬運料箱,執行成功率超過了 99%。

注重長期價值——“在工業場景中創造實際生產力”
特斯拉Optimus從一開始就選擇了聚焦工業場景,將人形機器人視作代替工廠中重復性、勞動密集型工作的有效工具,例如搬運、裝配等任務。2024年,其展示的“疊衣服”功能,雖然看似生活化,實質仍是為了驗證技術可行性,并未改變工業應用優先的戰略方向。
同樣地,開普勒機器人也選擇了明確的工業定位,直接瞄準倉儲物流、汽車制造等具體應用領域,提出“在工業場景中創造實際生產力”的發展理念。
與市場上部分追求“娛樂性”和視覺沖擊的機器人不同,開普勒將主要的研發精力投入在提升機器人作業可靠性方面,例如抗干擾能力、零部件耐用性和長期穩定性等工業用戶真正關注的核心指標上。畢竟對于工業用戶而言,機器人所具備的實用性遠比觀賞性的花哨動作更加重要。機器人能否翻跟頭或跳舞,或許能吸引公眾眼球,但這些并不能為工廠帶來真正的生產價值。
開普勒機器人始終堅持以工業應用需求為核心導向,同時具備強大的成本控制能力以及廣泛的全球合作網絡,這使得它在眾多人形機器人產品中脫穎而出。通過將“實用性”和“經濟性”深度融合,開普勒已成功搶占工業應用賽道的先機,并展現出更為明顯的市場競爭力和發展潛力。
從特斯拉到開普勒,人形機器人正在逐步擺脫“技術秀場”的形象,朝著真正具備產業價值的方向進化。這種趨勢清晰地告訴我們:機器人技術只有真正解決實際生產中的痛點,創造具體的經濟效益,才有可能實現真正的商業落地和產業規模化
但在繁榮的表象之下,行業也開始涌現出另一種聲音。金沙江創投管理合伙人朱嘯虎近期便提出了不同的看法:商業化落地困難、技術成本居高不下、具體應用場景尚不明朗等諸多因素,讓他們決定暫時擱置在這一領域的投資布局。
人形機器人究竟是“真風口”還是“行業泡沫”?就在市場對這一領域前景仍存疑慮時,一個意外的認可引起了業內的注意:全球頂級人形機器人公司Figure的CEO親自點贊了一家來自中國的黑馬企業——上海開普勒機器人。
這家初創公司旗下的K2“大黃蜂”機器人不僅在商業化道路上布局清晰明確,更令人關注的是,其商業模式與特斯拉Optimus高度相似。
從切入市場的方式看,開普勒人形機器人瞄準了工業領域這一明確的應用場景,并同時采用了“技術驅動+需求導向”的雙輪戰略。這一務實而前瞻的布局,或許正是讓開普勒在全球人形機器人賽道中脫穎而出的關鍵所在。
真正能在工廠里干活的機器人啥樣?
有研究預計,到2026年,中國人形機器人市場規模可達到104.71億元,到2035年更有望突破3000億元,其中工業場景應用占比可能超過60%。
但在實際工業環境中,并不是說機器人只要夠靈活、夠智能,就能在工廠里順利 “搬磚”。在真實的工廠環境里,人形機器人要想成為合格的 “打工人”,得具備一些特定的能力。
在工廠上班,效率是重中之重。一個合格的工人得能長時間連續干活,工廠可不會要那種干 2 小時就歇 2 小時的人。而且工廠的工作環境比較封閉,對工人的要求就是高效、熟練。另外,工人得服從企業管理,工作流程能高效響應,碰到特殊情況也知道按規范流程處理,這對安全生產特別重要。
這些要求和那些只會跳舞、翻跟頭的人形機器人發展方向完全不一樣。甚至有些用世界模型訓練的機器人,做個簡單小任務,成功率才 60%,根本沒法在工廠里好好干活。
那開普勒人形機器人憑啥就能在工業場景里落地,當好一個藍領工人呢?
連續工作的有效保障 ——“充電 1 小時,連干 8 小時”
在工廠,一個班次一般是8小時。通常得安排 2 個班組的工人輪流上班,要是產量任務重,還得加人,搞3個班組 24 小時不間斷三班倒。這樣一來,企業得儲備更多人力,管理起來也更麻煩,頻繁交接班還容易出生產事故。
開普勒人形機器人就特別厲害,它充電 1 小時,就能連續工作 8 小時。現在市面上,除了開普勒和特斯拉架構的機器人,其他機器人標稱續航大多在 2 - 4 小時,真到了實際搬運 5kg 以上的東西,或者做復雜動作的時候,能用的時間也就 1 - 2 小時。
就算安排人專門給機器人換電池,也不現實啊。要是工廠有 10 臺機器人,起碼得配 10 個人專門伺候它們換電池、維護,這哪是機器人給人打工,簡直是人在伺候機器人。開普勒人形機器人續航能達到 8 小時,可比其他機器人強太多了,能讓生產線一直穩定運行,生產效率大大提高,還不用專門安排人定時去維護。
開普勒人形機器人續航這么長,主要是因為它獨特的低能耗設計。它用的小導程方案,能讓機器人在運動的時候也節省能耗。機器人關節靜止或者承受反驅負載的時候,就算不供電,關節也能牢牢鎖住,不會變形移位。這種 “省電模式”,目前也就特斯拉和開普勒做得比較好。其他結構的人形機器人,要是電機不一直供電,關節根本固定不住,連站都站不穩,想維持個靜態姿勢都得一直耗電,續航短也是必然的。
而且,開普勒還有自己獨家的控制算法。這個算法能實時監測關節的狀態和受到的外力,機器人自己就能判斷什么時候可以 “無電自鎖” 休息會兒,什么時候得趕緊啟動執行器,防止位置偏移。這樣既能節能,反應又快,能量分配肯定是最合理的。
穩定工作的強壯身體 ——“超強負載能力,雙臂負載達 30 公斤”
現在市面上大家常見的人形機器人,好多都擅長跳舞、后空翻這些靈活的動作。但為啥很少看到它們在工廠里搬運重物、長時間干活呢?這是由它們的結構決定的。這些靈巧型的人形機器人大多是獨立電機驅動的鏈式串聯結構,這種結構自由度高、活動范圍大,確實很靈活,可剛性不足,不耐用,根本不適合在工廠干重體力活,干一會兒可能就壞了。工廠里常見的大型機械臂,大多是并聯結構,抗干擾能力強,可自由度低,活動范圍也受限。
開普勒和特斯拉的人形機器人采用了 “串并聯結構”,這個結構既能提高機器人的負載能力,又能讓它更靈活,就是研發起來難度很大。
目前,串聯結構機器人一般最大負載能力在 5kg 左右,在實際工業環境里根本不夠用。很多國家都有規定,單個搬運工人能抬舉的重量是有限的。比如英國規定,單個搬運工人不能抬超過 30 公斤的物品;美國職業安全與健康管理局一般建議不超過 50 磅(差不多 22.7 公斤)。這就意味著,如果人形機器人的負載能力達不到 25 - 30 公斤,碰到重體力搬運任務,人和普通機器人都干不了。
開普勒人形機器人就不一樣了,它通過串并聯結構里的自研行星滾柱絲杠執行器提供強大動力,雙臂負載能達到 30 公斤,完全滿足 “搬磚人” 對力量的需求。它的直線執行器推力峰值能達到 8200N,是普通電機的 3 - 5 倍,再搭配自研旋轉執行器,定位精度能達到 0.01 度,可以做毫米級的精細操作,動作又穩又可靠。在開普勒官方發布的實測視頻里,單個自研行星滾柱絲杠執行器甚至能拉起 200kg 的摩托車。
更有全球領先的 ROI 方案 ——“3 萬美元的平替特斯拉”
開普勒人形機器人續航8小時,能輕松替代 2 班工人連續工作,企業在產量需求大的時候,都不用額外儲備人力了。按照不同工位機器人替代工人的綜合效率 0.6 - 1 來算,一臺開普勒人形機器人差不多能替代 1.2 - 2 個人力。開普勒對外發布,第一批量采標準版機器人最低售價能降到約 3 萬美金 / 臺。
平均算下來,一臺能替代 1.5 個人力。企業要是購買了開普勒量采標準版機器人,就算把后續的軟件費用和延保費用都算上,平攤下來替代一個人類工人的總費用也就 14.3 萬。就拿中國長三角地區來說,企業雇傭一個普通工人,加上工資、社保、福利這些,一年的綜合成本大概在 8 - 10 萬元。14.3 萬的一次性投入,企業 1.5 - 1.8 年就能回本,能給企業節省不少后續人力成本。
開普勒人形機器人量采標準版能賣 3 萬美元左右,是因為他們改進了工藝,成功降低了核心零部件的成本。開普勒說,他們把每個螺母的磨削時間從 20 小時縮短到了 2 小時。原來 28 個關節模組需要 14 個規格,經過優化組合,最后只需要 4 個旋轉規格和 4 個直線規格,這樣就能通過批量生產降低成本。算下來,整個機器人的關節模組成本預計能降低 50%。
國外的人形機器人價格動不動就上百萬美元的售價,在國內,和開普勒能力差不多的人形機器人,目前定價大概在 50 - 70 萬人民幣左右。開普勒賣 3 萬美元,明顯就是想成為 “特斯拉 Optimus 平替款”,滿足工業客戶對性價比的高要求,從經濟賬上看,真的很劃算。
在裝配線柔性化方面,開普勒人形機器人也很有優勢。在汽車制造過程中,傳統的機械臂得在固定的工位上編程才能工作,開普勒人形機器人就不一樣了,它能適應那些沒有固定結構的環境,像沖壓收料、零部件裝配這些工作都能做。它還有自研的力觸覺靈巧手,可以通過多模態靈巧操作完成很精細的任務。
傳統的自動導引車(AGV)進工廠的話,需要鋪設磁軌,或者改造工廠環境,這就得花不少額外的錢。開普勒人形機器人就方便多了,它不用改造環境,靠著視覺 SLAM 和紅外雙目 3D 攝像頭就能實現自主導航,在復雜的操作環境里,也能安全又穩定地搬運 30kg 的料箱或者托盤。比如說,K2 型號已經在實際的倉庫環境中測試搬運料箱,執行成功率超過了 99%。
注重長期價值——“在工業場景中創造實際生產力”
特斯拉Optimus從一開始就選擇了聚焦工業場景,將人形機器人視作代替工廠中重復性、勞動密集型工作的有效工具,例如搬運、裝配等任務。2024年,其展示的“疊衣服”功能,雖然看似生活化,實質仍是為了驗證技術可行性,并未改變工業應用優先的戰略方向。
同樣地,開普勒機器人也選擇了明確的工業定位,直接瞄準倉儲物流、汽車制造等具體應用領域,提出“在工業場景中創造實際生產力”的發展理念。
與市場上部分追求“娛樂性”和視覺沖擊的機器人不同,開普勒將主要的研發精力投入在提升機器人作業可靠性方面,例如抗干擾能力、零部件耐用性和長期穩定性等工業用戶真正關注的核心指標上。畢竟對于工業用戶而言,機器人所具備的實用性遠比觀賞性的花哨動作更加重要。機器人能否翻跟頭或跳舞,或許能吸引公眾眼球,但這些并不能為工廠帶來真正的生產價值。
開普勒機器人始終堅持以工業應用需求為核心導向,同時具備強大的成本控制能力以及廣泛的全球合作網絡,這使得它在眾多人形機器人產品中脫穎而出。通過將“實用性”和“經濟性”深度融合,開普勒已成功搶占工業應用賽道的先機,并展現出更為明顯的市場競爭力和發展潛力。
從特斯拉到開普勒,人形機器人正在逐步擺脫“技術秀場”的形象,朝著真正具備產業價值的方向進化。這種趨勢清晰地告訴我們:機器人技術只有真正解決實際生產中的痛點,創造具體的經濟效益,才有可能實現真正的商業落地和產業規模化